其他
伯努利机械手指(接触式)

产品视频 |
使用环境和规格/规格产品概要
伯努利原理机械手指(接触式)的原理 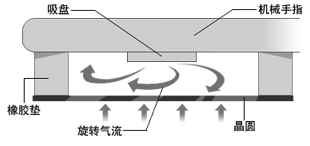
|
产品特点
- 针对存在翘曲的晶圆,以及减薄晶圆设计的具有高性价比特点的伯努利原理机械手指。
- 可以配套JEL所有类型的大气搬运机械手臂使用。
- 通过使用晶圆样品进行实际的验证传输测试,可以按照客户的需要,针对不同尺寸,翘曲量,晶圆厚度的任意形状的晶圆进行机械手指的定制设计。
- 利用伯努利原理的气流压力差吸附晶圆。
- 利用橡胶垫和晶圆之间的摩擦力,防止晶圆在传输过程中可能发生的位置偏移。
- 晶圆表面和机械手指的橡胶垫发生接触,能够同时对应不同规格的晶圆(※特殊情况的组合下,存在无法实现不同尺寸晶圆兼顾的情况),相对于非接触式机械手指,接触式机械手指的厚度可以做到更薄。
- 相对于真空吸附方式的手指,伯努利原理机械手指的吸附力会分散到整个晶圆表面,更适合用于减薄晶圆的传输。
标准规格
| 材质 | 铝 |
|---|---|
| 表面处理 | 黑色表面阳极氧化 |
| 晶圆固定方式 | 旋风式真空吸盘提供吸力,橡胶垫(H-NBR)用于晶圆固定 (和晶圆表面接触部分的材质可以定制生产) |
| 配套设施 | 30~80L/min(随搬运物的尺寸,厚度变化) |
关于产品规格,欢迎垂询。
指南
- ...大气
- ...真空
- ...防水
- ...单臂
- ...双臂
- ...薄片晶圆
- ...CE標註
- ...JEL标准
- ...KCs標註