半导体搬运机械手臂
JCR4400 (带有对应PLP自动校准功能的机械手臂)

产品视频 |
使用环境和规格/规格产品概要
产品型号列表
|
||||||||||||||||||
产品特点
带有对应PLP自动校准功能的4轴水平多关节型洁净机械手臂
- 适用于并列配置工位的传送
- 非接触校准功能可实现高精度的搬运
- 可搬运重量10kg
标准规格
| 机械手臂规格 | ||||
|---|---|---|---|---|
| 机械手臂型号 | JCR4400-400-AM | |||
| 被搬运物 | 基板 500 mm x 500 mm | |||
| 晶圆吸附方式 | 真空吸附式 | |||
| 机械结构格式 | 水平多关节 | 控制轴 | 4轴 | |
| 电机类型 | AC伺服电机 | |||
| 可动范围 | 被搬送物体中心到达距离 | 旋转角度(θ轴) | 升降(Z轴) | |
| 1290 mm | 330 度 | 400 mm | ||
| 搬运速度 | 手臂(R轴) | 旋转角度(θ轴) | 升降(Z轴) | |
| 1170 mm/1.6 sec | 330 度/1.5 sec | 400 mm/1.4 sec | ||
| 精度 | 第1关节轴 (J1轴) | 第2关节轴 (J2轴) | 第3关节轴 (J3轴) | |
| 3.5x10-3 度 | 1.8x10-3 度 | 1.8x10-3 度 | ||
| 第4关节轴 (J4轴) | ||||
| 2.4x10-3 度 | ||||
| 重复性精度 | ±0.2 mm以内 | |||
| 洁净度 | 机械手臂体: 0.3 µm/cf Class 10 (驱动结构内部独立排气条件下) | |||
| 厂务 | 电源:単相 AC200V±10% 4 kVA 真空:优于-53kPa | |||
| 质量 | 机械手臂体 大约120 kg | |||
| 控制器规格 | ||||
| 控制器型号 | C5000S系列 | |||
| 控制通讯方式 | RS232C及并口I/O方式 | |||
| 外观图(标准规格) |
|---|
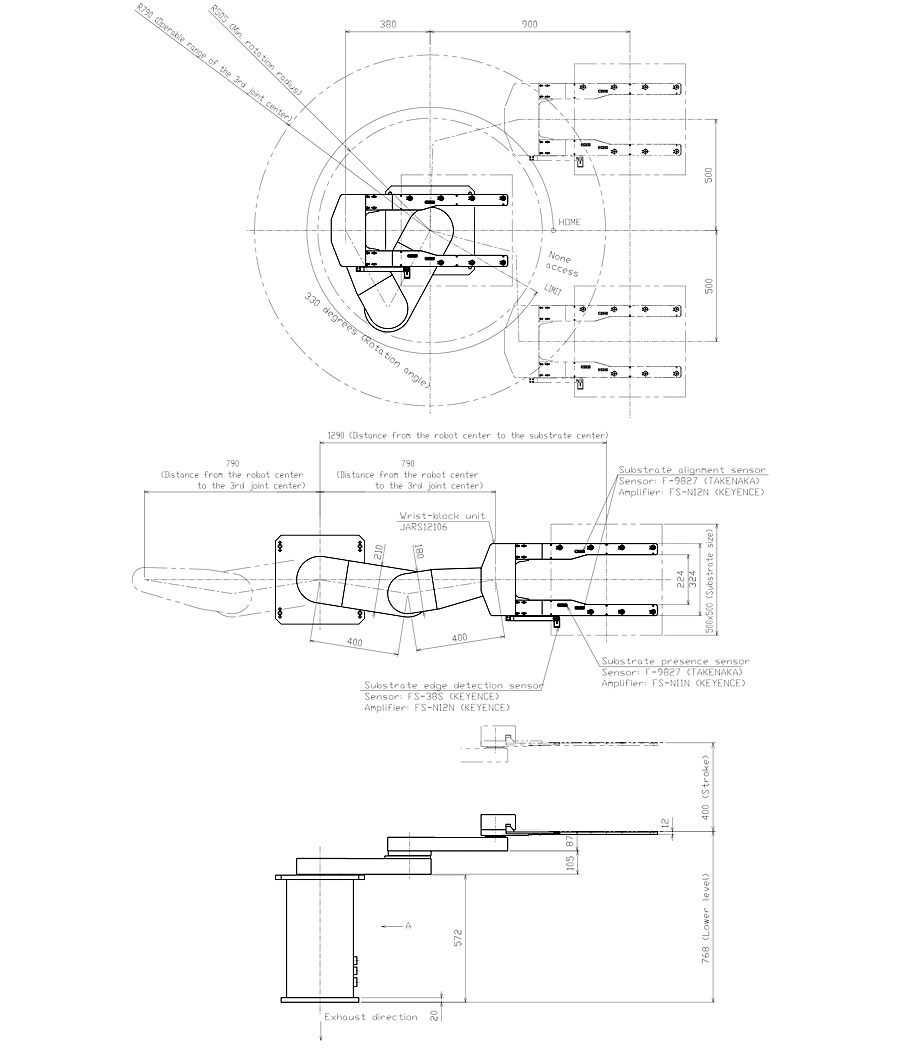
|
指南
- ...大气
- ...真空
- ...防水
- ...单手指
- ...双手指
- ...薄片晶圆
- ...CE標註
- ...JEL标准
- ...KCs標註