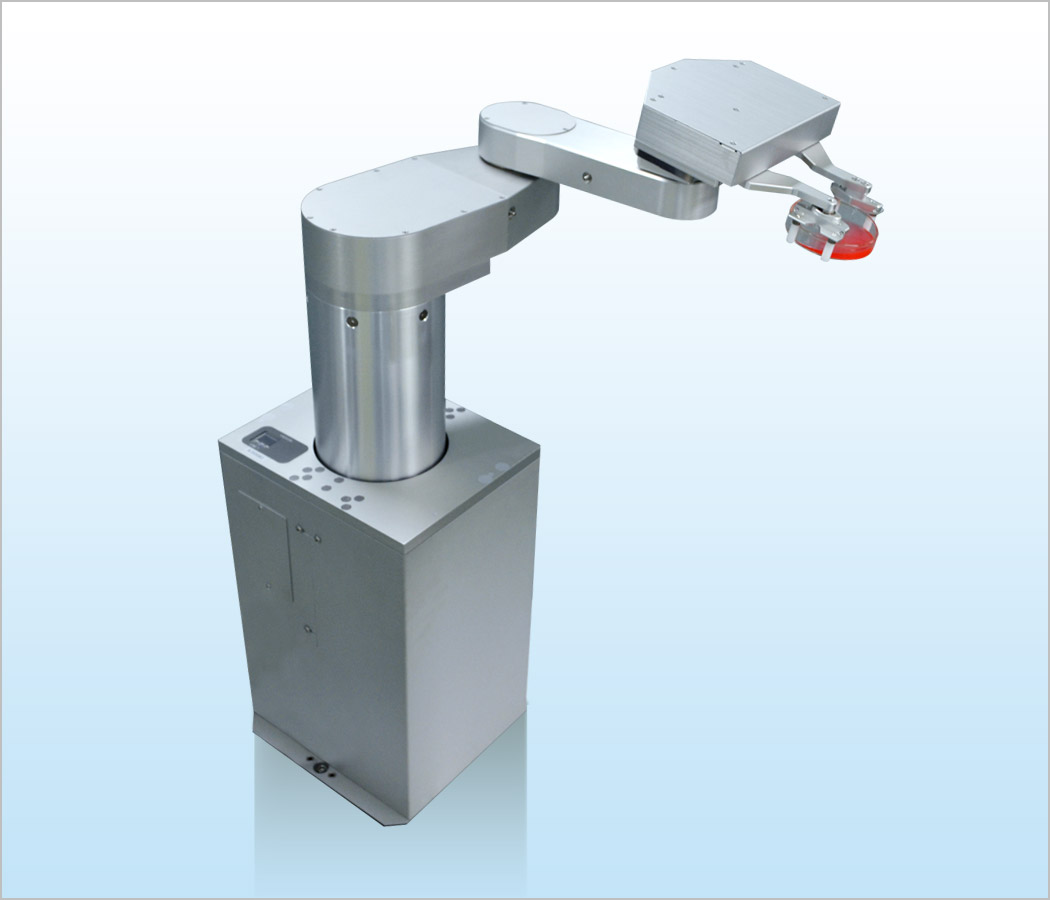
培养皿搬运机械手臂
产品视频 |
使用环境和规格/规格产品概要
产品型号列表
|
||||||||||||||||
产品特点
- 可在医疗、生化相关设施等无菌室、洁净室内使用的自动搬运系统
- 可搬运微孔板
- 通过倾斜机构使培养皿倾斜,方便吸取培养液
- 可安装在我司各种类型的机械手臂上,下述规格为安装在水平多关节型机械手臂上的规格
标准规格
| 机械手臂规格 | |||
|---|---|---|---|
| 机械手臂型号 | GCR4210-300-AM | ||
| 被搬运物 | 培养皿 φ90mm x 21mm(玻璃)(※也可对应客户对其他尺寸培养皿及微孔板的需求) | ||
| 培养皿夹取 | 气缸驱动的机械式夹取方式 | ||
| 机械结构格式 | 水平多关节型 | 控制轴 | 4轴 |
| 电机类型 | AC伺服电机 | ||
| 可动范围 | 手臂第3关节中心基准 | 旋转角度(θ轴) | 升降(Z轴) |
| 400mm | 335度 | 300mm | |
| 搬运速度(平均) | 手臂(R轴) | 旋转角度(θ轴) | 升降(Z轴) |
| 165mm/sec | 165deg/sec | 150mm/sec | |
| 重复性精度 | ±0.1mm以内 | ||
| 洁净度 | ISO标准 Class 2 (驱动结构内部独立排气条件下) | ||
| 厂务 | 压缩空气:驱动的边缘夹持 (0.15MPa以上); 用于腕部摆动机构(0.3MPa以上) | ||
| 质量 | 机械手臂体:大约 37kg | ||
| 控制器规格 | |||
| 控制器型号 | C5000S 系列 | ||
| 控制方式 | 串口RS232C或者并口光学I/O口 | ||
| 外观图(标准规格) |
|---|
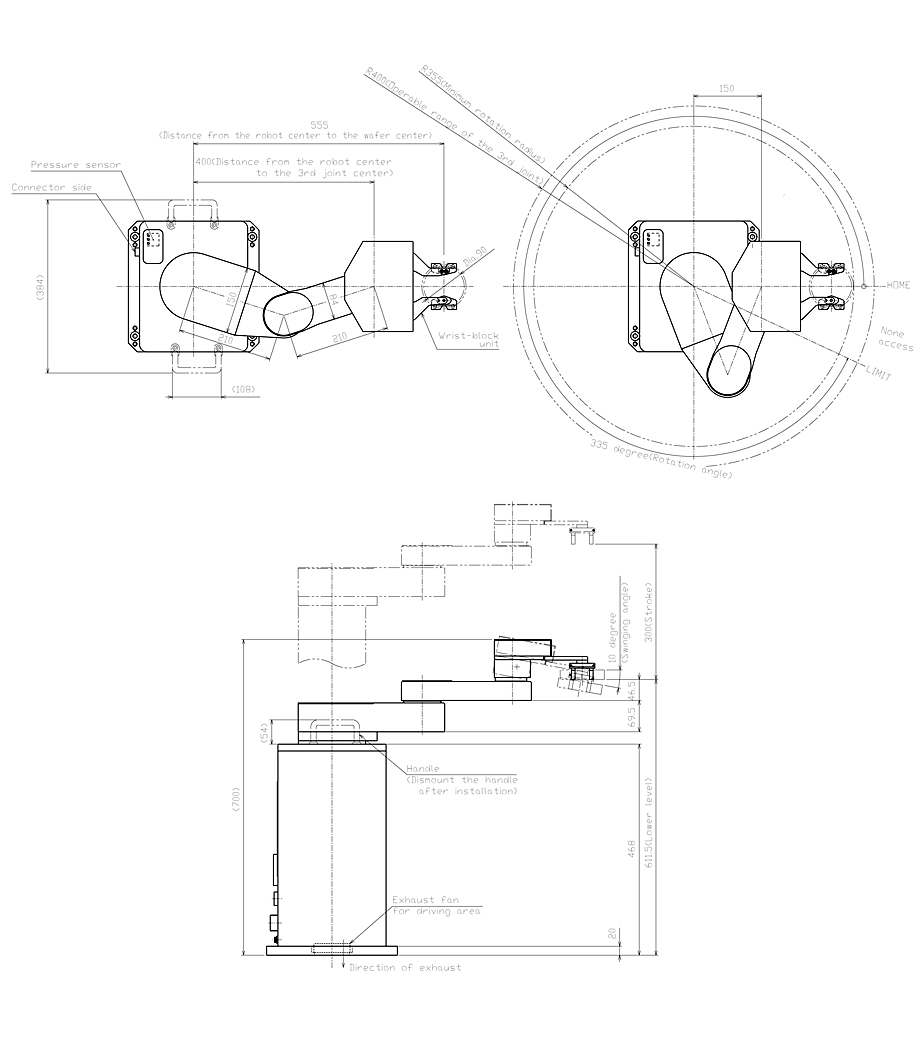
|
指南
- ...大气
- ...真空
- ...防水
- ...单臂
- ...双臂
- ...薄片晶圆
- ...CE標註
- ...JEL标准
- ...KCs標註