半导体搬运机械手臂
SCR3100S(小径晶圆用)4轴圆柱坐标洁净机械手臂

产品视频
|
使用环境和规格/规格
产品概要
| 型号名称 | SCR3100S |
|---|
| 使用环境 | 洁净间内的大气环境 |
|---|
| 手臂 | 单臂 |
|---|
| 到达距离 | 195mm(手臂第3关节中心到达距离) |
|---|
| 升降轴最大行程 | 200mm / 300mm |
|---|
| 可搬运质量 | 0.5kg以下(手臂第3关节处基准) |
|---|
产品型号列表
| 产品型号 | 升降轴最大行程 |
|---|
| 标准 | SCR3100S-200-PM | 200mm |
| 标准 | SCR3100S-300-PM | 300mm |
|
产品特点
适用于超级洁净间要求的3轴圆柱坐标洁净机械手臂SCR3100S系列。
适用于半导体生产设备内部,检测设备等小尺寸晶圆的搬运,通过优化机械手臂的空间尺寸,有利于实现设备的小型化。
- 提高洁净度的方法:手臂内部排气口安装0.1µm级过滤器
- 适应设备需求可以选择底座固定方式,或者法兰固定方式
- 配备动作监视器
- 控制通讯方式:RS232C及并口I/O方式
- 全轴采用2相步进电机
- S曲线加减速控制方式能够高速,高精度地搬运半导体晶圆
- 晶圆固定方式: 真空吸附式,下托式,边缘夹持式
- 手指材质:CFRP(碳纤维),铝合金,高纯度陶瓷等多种可选材质
- 可以针对搬运物体,客户设备布局的实际情况提供最优的手指
标准规格
上述规格为本司使用标准真空吸附方式手指情况下的标准机械手臂规格的一个示例
| 机械手臂型号 |
SCR3100S-200-PM |
| 腕部机构模块 |
SARS00169 |
手指 |
3D-02535 |
| 被搬运物 |
~150mm 晶圆 |
| 晶圆吸附方式 |
真空吸附式 |
| 机械结构格式 |
圆柱坐标 |
控制轴 |
3轴 |
| 电机类型 |
步进电机 |
| 可动范围 |
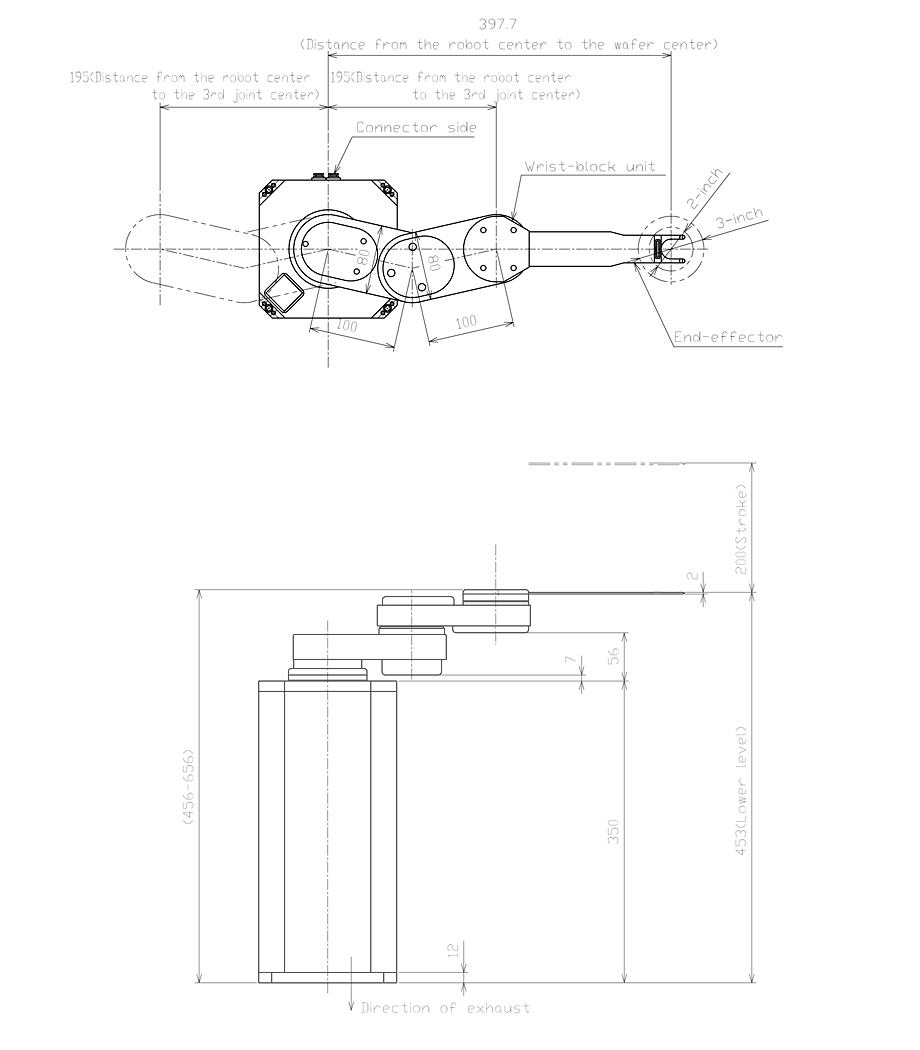
被搬送物体中心到达距离 |
旋转角度(θ轴) |
升降(Z轴) |
| 397.7mm |
340度 |
200mm |
| 搬运速度(平均) |
手臂(R轴) |
旋转角度(θ轴) |
升降(Z轴) |
| 330mm/sec |
280度/sec |
130mm/sec |
| 搬运速度(最大) |
手臂(R轴) |
旋转角度(θ轴) |
升降(Z轴) |
| 500mm/sec |
480度/sec |
170mm/sec |
| 重复性精度 |
±0.1mm以内 |
| 洁净度 |
ISO标准 Class 2 (驱动结构内部独立排气条件下) |
| 厂务 |
电源:DC24V±10% 8A 真空:优于-53kPa |
| 控制器型号 |
C4000 |
| 控制通讯方式 |
控制通讯方式:RS232C及并口I/O方式 |
产品一览