半导体搬运机械手臂
SCR3160CSN (采用闭环位置控制)3轴圆柱坐标洁净机械手臂


产品视频
|
使用环境和规格/规格
产品概要
| 型号名称 | SCR3160CSN |
|---|
| 使用环境 | 洁净间内的大气环境 |
|---|
| 手臂 | 单臂 |
|---|
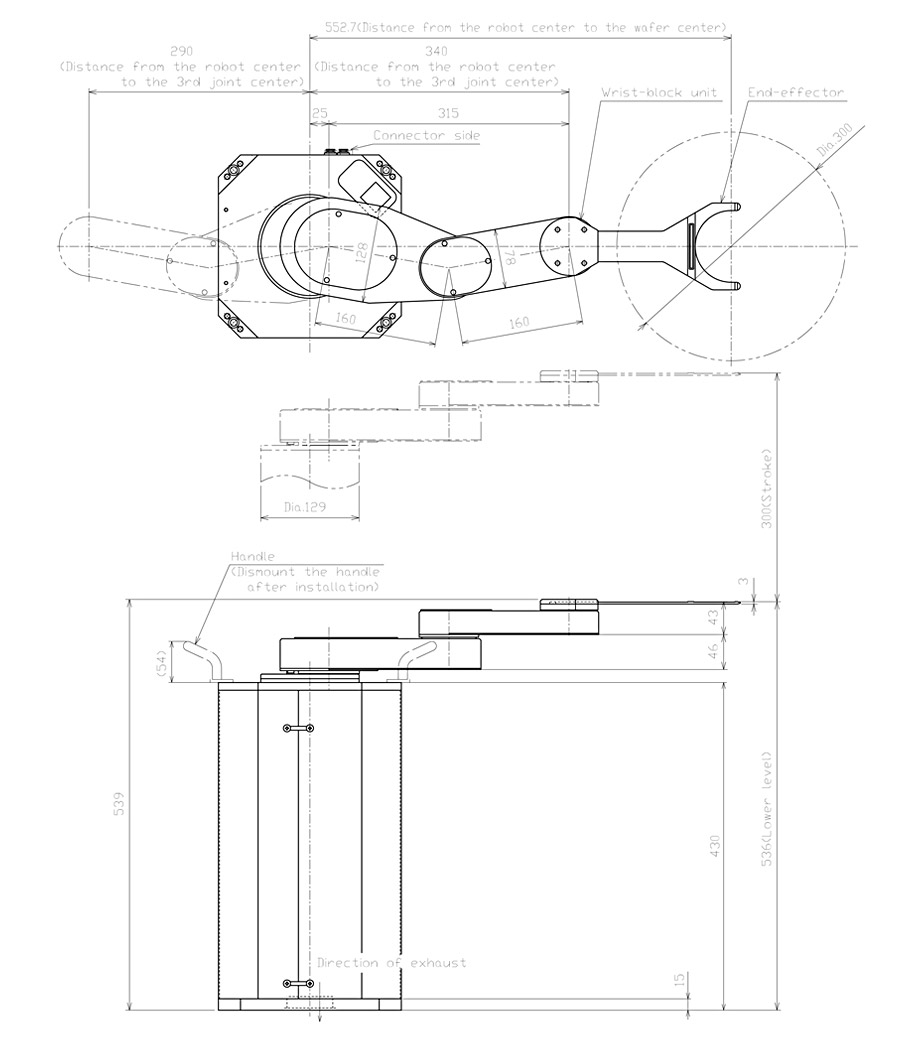
| 到达距离 | 340mm (手臂第3关节中心基准) |
|---|
| 升降轴最大行程 | 200mm / 300mm / 400mm / 450mm / 500mm |
|---|
| 可搬运质量 | 3kg (手臂第3关节处基准) |
|---|
产品型号列表
| 产品型号 | 升降轴最大行程 |
|---|
| SCR3160CSN-200-CM | 200mm |
| SCR3160CSN-300-CM | 300mm |
| SCR3160CSN-400-CM | 400mm |
| SCR3160CSN-450-CM | 450mm |
| SCR3160CSN-500-CM | 500mm |
|
产品特点
适用于超级洁净间要求的3轴圆柱坐标洁净机械手臂
在保持高性价比和高速传输特性的基础上,解决了步进电机常见的丢步问题,适用于2寸-300mm晶圆传输的新型单臂机械手臂
- 采用即使在负载发生突变或者加减速过大的情况也能够避免电机丢步现象的闭环控制方式,有效地提高了机械手臂的可靠性
- 电机配备绝对值编码器,机械手臂能够在任何情况下知道自己的当前位置,缩短了机械手臂各动作轴寻找自身位置原点的时间
- 绝对值编码器为机械式,不需要更换电池
- 可以和旧型号的本司产品兼容(安装尺寸,性能互换),方便客户对现有设备的升级改造
- 高强度手臂・手臂第3关节处可承受3kg力(包含腕部机构模块,手指,晶圆的质量)
- 机械手臂标准臂长:100mm, 130mm, 160mm, 200mm
- 可根据设备布局选择基座固定方式,或法兰固定方式
- 可选伯努利方式手指(Option)
标准规格
上述规格为本司使用标准真空吸附方式手指情况下的标准机械手臂规格的一个示例
| 机械手臂型号 |
SCR3160CSN-300-CM |
| 被搬运物 |
~300mm 晶圆 (其他可根据特殊晶圆的形状,材质为客户提供灵活的定制设计) |
| 晶圆吸附方式 |
真空吸附式 |
| 机械结构格式 |
圆柱坐标 |
控制轴 |
3轴 |
| 电机类型 |
步进电机(采用闭环位置控制) |
| 可动范围 |
被搬运物体中心到达距离 |
旋转角度(θ轴) |
升降(Z轴) |
| 552.7mm |
340度 |
300mm |
| 搬运速度(平均) |
手臂(R轴) |
旋转角度(θ轴) |
升降(Z轴) |
| 610mm/sec |
340度/sec |
250mm/sec |
| 搬运速度(最大) |
手臂(R轴) |
旋转角度(θ轴) |
升降(Z轴) |
| 1220mm/sec |
500度/sec |
320mm/sec |
| 精度 |
手臂(R轴) |
旋转角度(θ轴) |
升降(Z轴) |
| 10.0µm以下 |
0.0015度 |
2.0µm |
| 重复性精度 |
±0.1mm以内 |
| 洁净度 |
ISO标准 Class 2(驱动结构内部独立排气条件下) |
| 厂务 |
电源:DC24V±10% 10A 真空:-53kPa以上 |
| 控制器型号 |
C4000B |
| 控制方式 |
串口RS232C或者并口光学I/O口 |
产品一览