半导体搬运机械手臂
STCR4160SN(减薄晶圆以及晶圆四周边缘区域的真空吸附方式)4轴圆柱坐标洁净机械手臂
|
使用环境和规格/规格产品概要
|
产品型号列表
| 产品型号 & 升降轴最大行程 | |||
|---|---|---|---|
| STCR4160SN-200-PM | 200mm | ||
| STCR4160SN-300-PM | 300mm | ||
| STCR4160SN-400-PM | 400mm | ||
| STCR4160SN-450-PM | 450mm | ||
| STCR4160SN-500-PM | 500mm | ||
产品视频
- 照片和视频展示产品为 STCR4160SN-300-PM
产品特点
适用于超级洁净间要求的4轴圆柱坐标洁净机械手臂
在保持高性价比和高速传输特性的基础上,解决了步进电机常见的丢步问题,适用于减薄晶圆以及晶圆四周边缘区域真空吸附方式的新型双臂机械手臂。
- 采用了不会发生丢步现象的控制方式来控制步进电机
- 高强度手臂/手臂第3关节处可承受3kg力(包含腕部机构模块,晶圆的质量)
- 适应设备需求可以选择底座固定方式,或者法兰固定方式
标准规格
| 机械手臂规格 | ||||
|---|---|---|---|---|
| 机械手臂型号 | STCR4160SN-300-PM | |||
| 腕部机构模块 | SART09362 | 手指 | 高位手指:3D-09371 低位手指:3D-09370 |
|
| 被搬运物 | ~300mm 硅片晶圆 | |||
| 晶圆吸附方式 | 高位手指:真空吸附式(晶圆外边缘区域吸附) 低位手指:旋风吸盘和缓冲橡胶垫配合的晶圆吸附方式(和晶圆表面接触部分的材质可以按照客户需求进行定制设计) |
|||
| 机械结构格式 | 圆柱坐标 | 控制轴 | 4轴 | |
| 电机类型 | 全轴采用2相步进电机 | |||
| 可动范围 | 被搬运物体中心到达距离 | 旋转角度(θ轴) | 升降(Z轴) | |
| 625mm | 340度 | 300mm | ||
| 搬运速度(平均) | 手臂(R轴) | 旋转角度(θ轴) | 升降(Z轴) | |
| 400mm/sec | 180度/sec | 200mm/sec | ||
| 搬运速度(最大) | 手臂(R轴) | 旋转角度(θ轴) | 升降(Z轴) | |
| 800mm/sec | 220度/sec | 250mm/sec | ||
| 重复性精度 | ±0.1mm以内 | |||
| 洁净度 | ISO标准 Class 2 (驱动结构内部独立排气条件下) | |||
| 厂务 | 电源:DC24V±10% 16A 洁净气源:60SLM 0.1~0.3MPa 真空:优于-53kPa |
|||
| 质量 | 机械手臂体 大约30kg | |||
| 控制器规格 | ||||
| 控制器型号 | C4000 | |||
| 通讯方式 | 控制方式:串口RS232C或者并口光学I/O口 | |||
| 外观图(标准规格) |
|---|
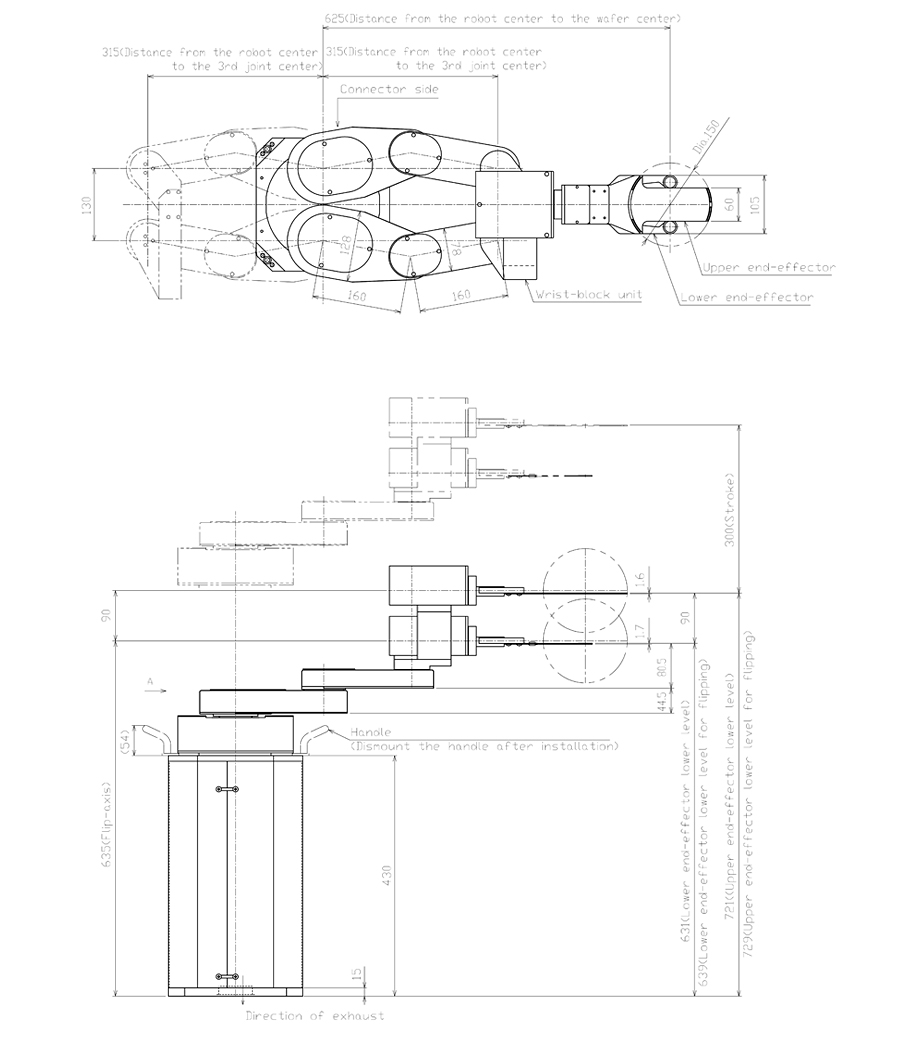
|
指南
- ...大气
- ...真空
- ...防水
- ...单臂
- ...双臂
- ...薄片晶圆
- ...CE標註
- ...JEL标准
- ...KCs標註